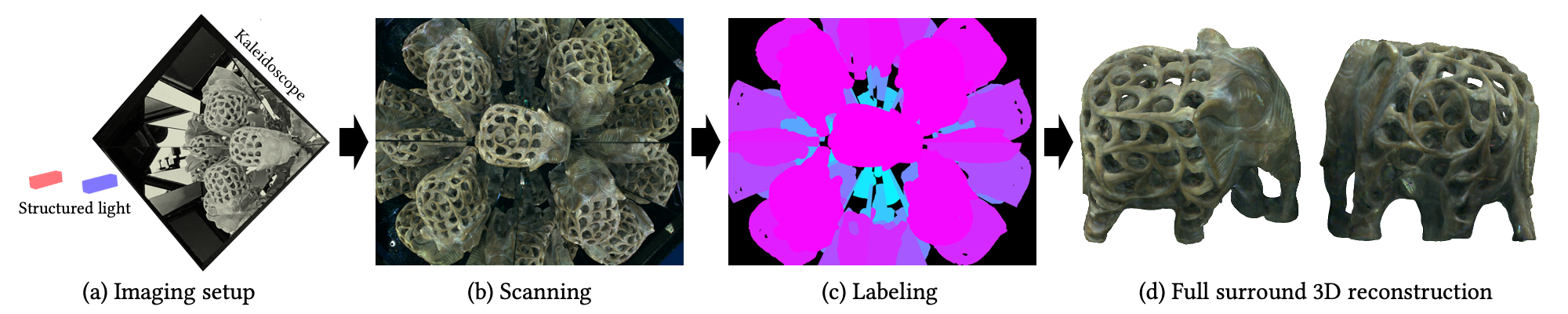
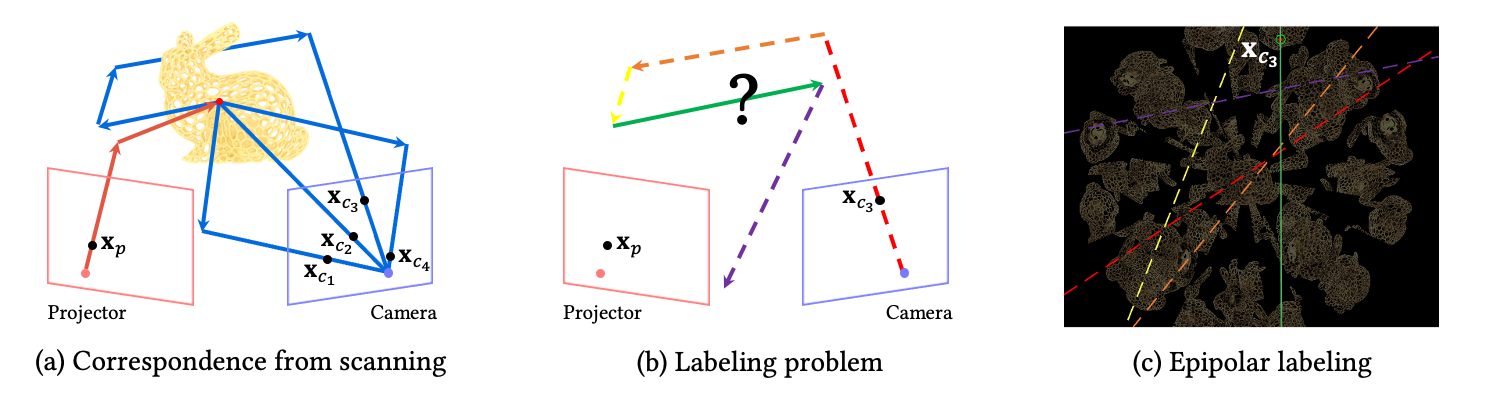
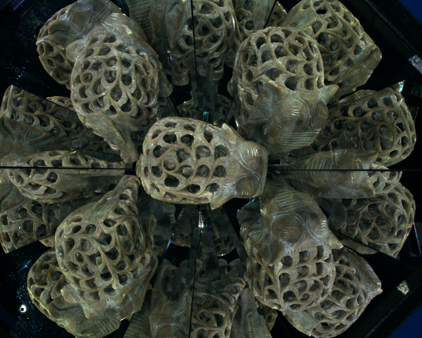
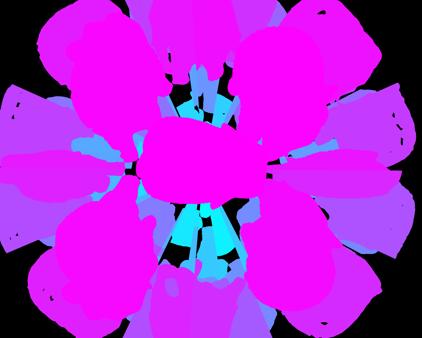
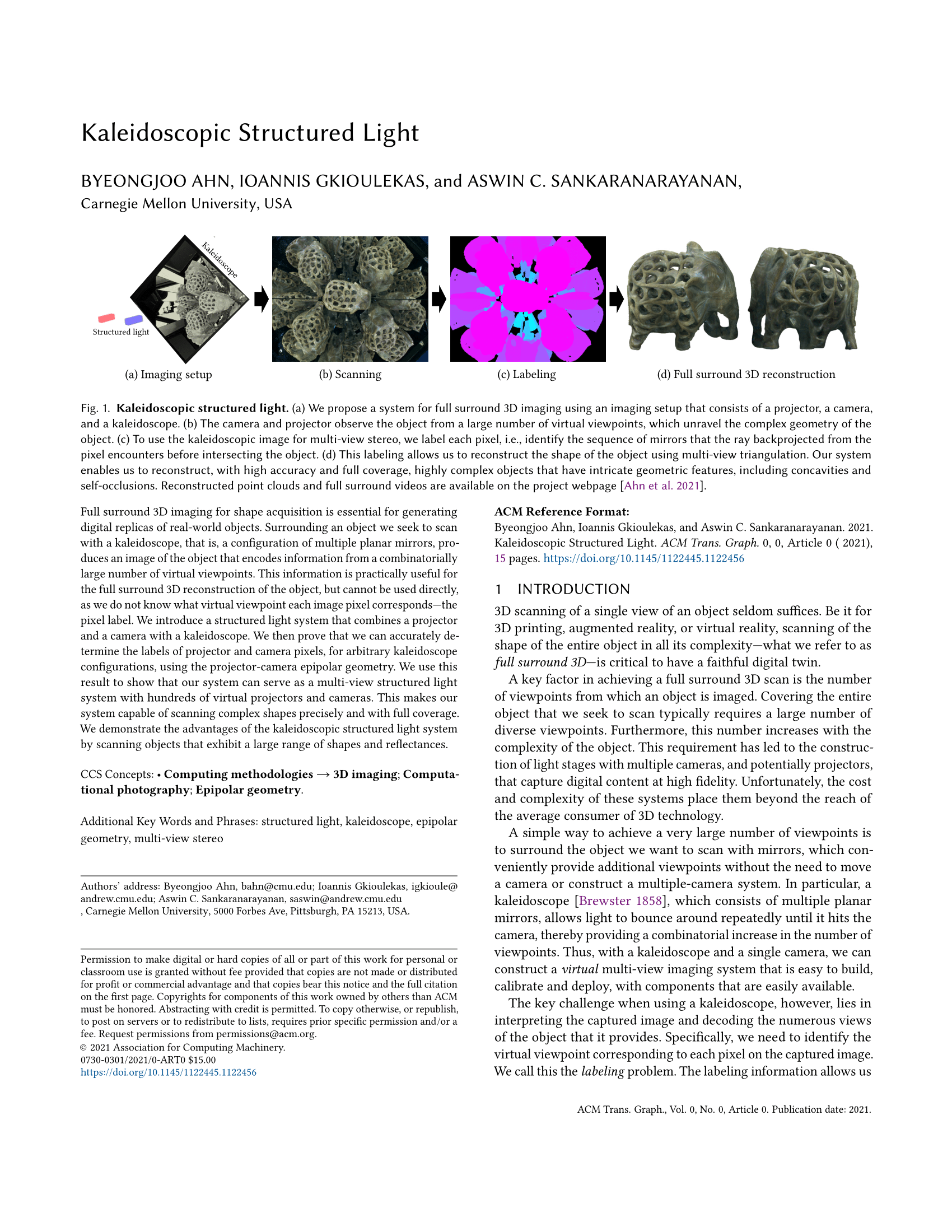
Full surround 3D imaging for shape acquisition is essential for generating digital replicas of real-world objects. Surrounding an object we seek to scan with a kaleidoscope, that is, a configuration of multiple planar mirrors, produces an image of the object that encodes information from a combinatorially large number of virtual viewpoints. This information is practically useful for the full surround 3D reconstruction of the object, but cannot be used directly, as we do not know what virtual viewpoint each image pixel corresponds---the pixel label. We introduce a structured light system that combines a projector and a camera with a kaleidoscope. We then prove that we can accurately determine the labels of projector and camera pixels, for arbitrary kaleidoscope configurations, using the projector-camera epipolar geometry. We use this result to show that our system can serve as a multi-view structured light system with hundreds of virtual projectors and cameras. This makes our system capable of scanning complex shapes precisely and with full coverage. We demonstrate the advantages of the kaleidoscopic structured light system by scanning objects that exhibit a large range of shapes and reflectances.