Abstract
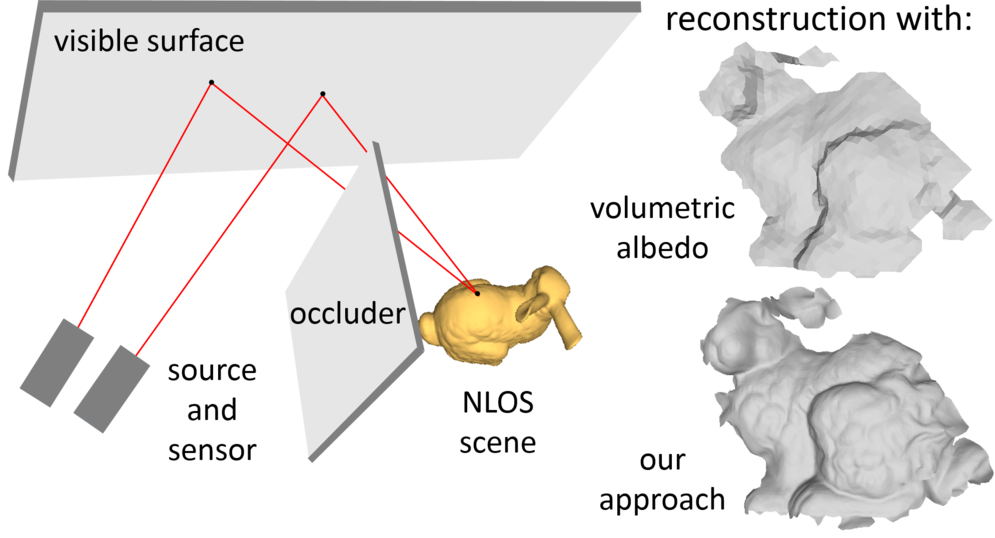
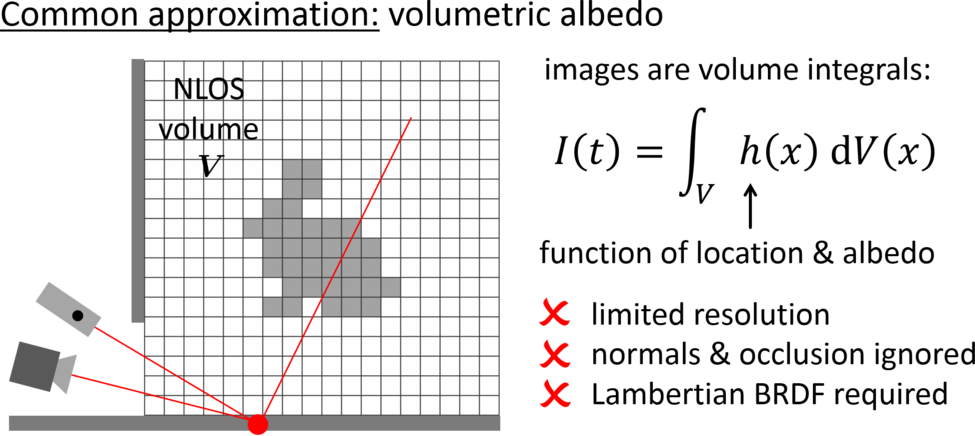
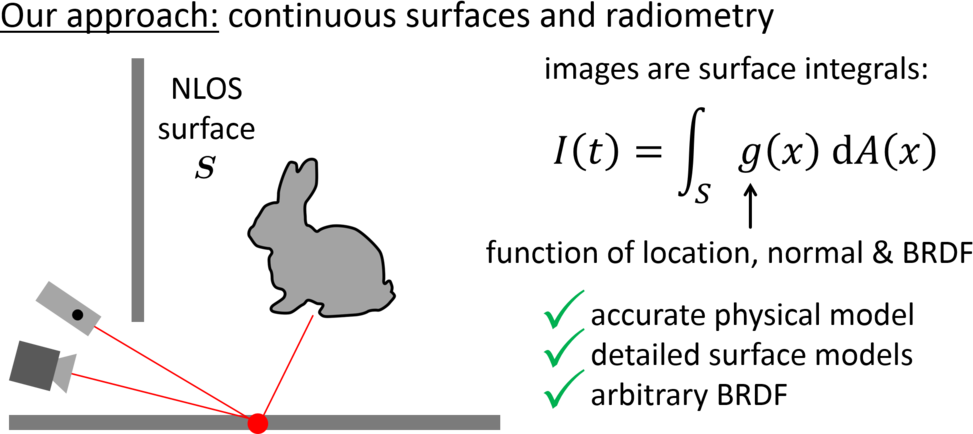
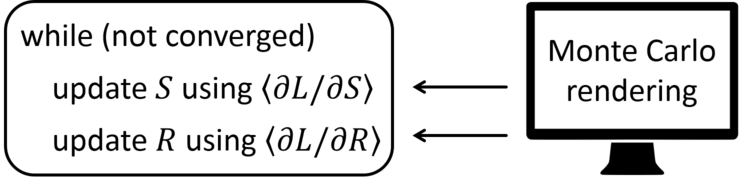
Non-line-of-sight (NLOS) imaging is the problem of reconstructing properties of scenes occluded from a sensor, using measurements of light that indirectly travels from the occluded scene to the sensor through intermediate diffuse reflections. We introduce an analysis-by-synthesis framework that can reconstruct complex shape and reflectance of an NLOS object. Our framework deviates from prior work on NLOS reconstruction, by directly optimizing for a surface representation of the NLOS object, in place of commonly employed volumetric representations. At the core of our framework is a new rendering formulation that efficiently computes derivatives of radiometric measurements with respect to NLOS geometry and reflectance, while accurately modeling the underlying light transport physics. By coupling this with stochastic optimization and geometry processing techniques, we are able to reconstruct NLOS surface at a level of detail significantly exceeding what is possible with previous volumetric reconstruction methods.