Particle Image Velocimetry (PIV)
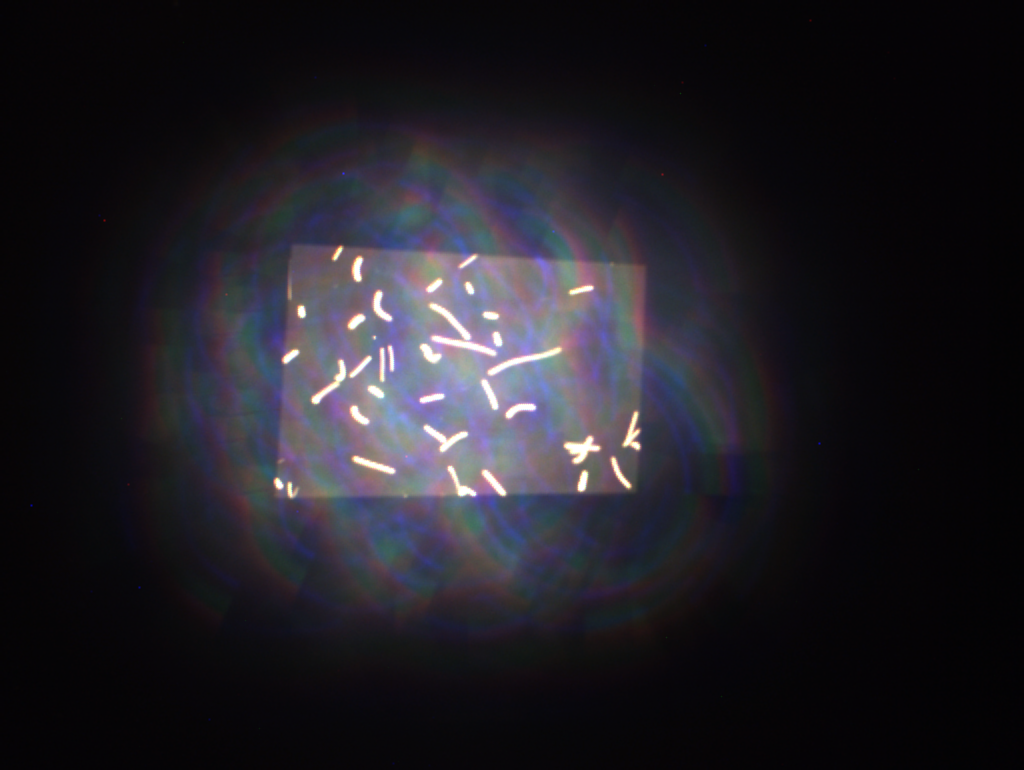
In PIV, the movements of sparse particles suspended in fluid are tracked in order to measure the flow of the fluid.
The captured images contain a significant amount of background signal that impacts the reconstruction quality. To remove it, we estimate an image of the background signal by taking the minimum value over the temporal dimension of a full video captured of the tank --- we used 100 frames. We then take this estimated frame and subtract it from the frame we want to reconstruct.

Parameters
λsparsity=1e-6, λdx=λdy=4e-6,
λdt=1e-6